Correct Contacts Shell Face
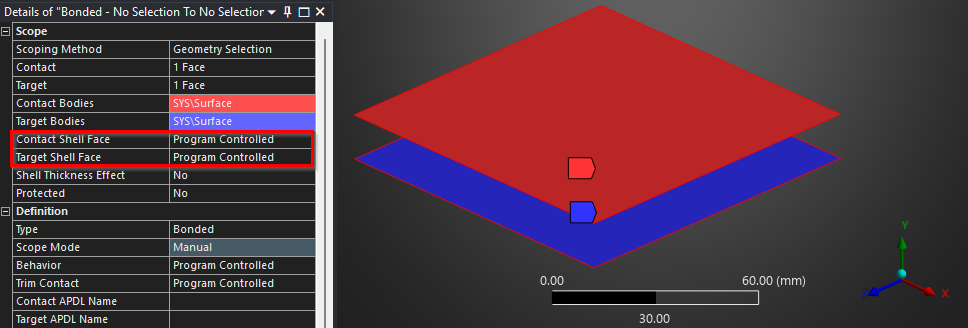
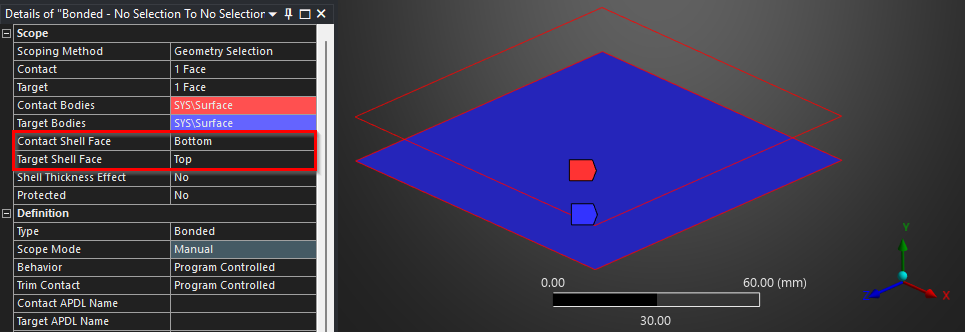
This script loops through all contact region objects and (re-)defines Contact Shell Face and Target Shell Face so that the normal vectors point towards each other. Note. The Contact/Target scoping for each contact region object is limited to one face.
Initial:
After running the script:
import System
'''Correct contact/target shell face so they point towards each other!'''
def dot_product(x, y): return sum([x[i] * y[i] for i in range(len(x))]) < 0
contacts = DataModel.GetObjectsByType(DataModelObjectCategory.ContactRegion)
for contact in contacts:
contact_face = contact.SourceLocation.Entities[0] # contact face
centroid_c = contact_face.Centroid
point = System.Array[float]([centroid_c[0],centroid_c[1],centroid_c[2]]) # units are geometry units. Usually meters
v = contact_face.ParamAtPoint(point)
normal_vector_c = contact_face.NormalAtParam(v[0],v[1])
target_face = contact.TargetLocation.Entities[0]
centroid_t = target_face.Centroid
point = System.Array[float]([centroid_t[0],centroid_t[1],centroid_t[2]]) # units are geometry units. Usually meters
u = target_face.ParamAtPoint(point)
normal_vector_t = target_face.NormalAtParam(u[0],u[1])
contact_target_vector = [centroid_t[0]-centroid_c[0],centroid_t[1]-centroid_c[1],centroid_t[2]-centroid_c[2]]
contact_target_vector_rel_contact_normal = dot_product(normal_vector_c,contact_target_vector)
''' if contact_target_vector_rel_contact_normal == True, then the vector from contact --> target is opposite the
normal vector from the contact face. This sets the <<<<< CONTACT SHELL FACE >>>>>'''
if contact_target_vector_rel_contact_normal:
contact.ContactShellFace = ShellFaceType.Bottom
normal_vector_c = [normal_vector_c[0]*(-1),normal_vector_c[1]*(-1),normal_vector_c[2]*(-1)]
else: contact.ContactShellFace = ShellFaceType.Top
colinear = dot_product(normal_vector_c,normal_vector_t) # if colinear = -1 --> vectors point in opposite direction
if colinear: contact.TargetShellFace = ShellFaceType.Top
else: contact.TargetShellFace = ShellFaceType.Bottom